 Products Home / Optomechanical Components / Vacuum Components / Vacuum-Compatible Piezoelectric Inertia Actuators
Products Home / Optomechanical Components / Vacuum Components / Vacuum-Compatible Piezoelectric Inertia ActuatorsVacuum-Compatible Piezoelectric Inertia Actuators

- Vacuum-Compatible Down to 10-6 Torr
- 20 nm Typical Step Size
- 2 mm/minute Typical Speed
- 2.5 kg Max Axial Load Capacity
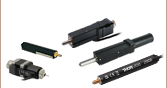
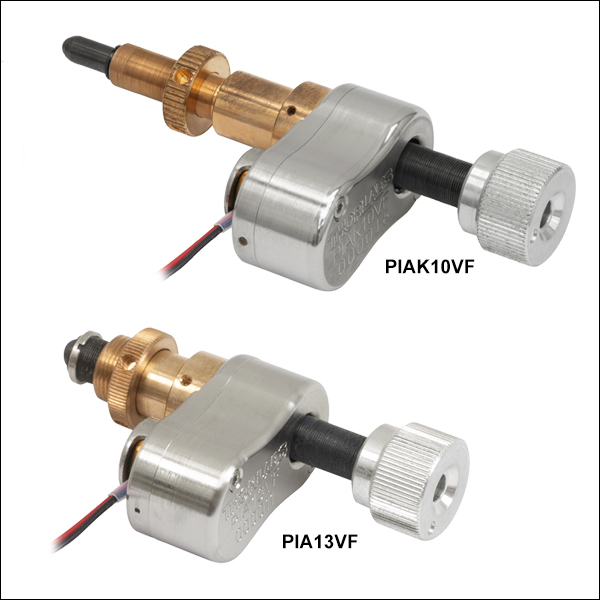
PIA13VF
13 mm Travel Range,
3/8"-40 Thread and Ø3/8" Barrel
Application Idea
Three PIAK10VF Piezo Inertia Actuators can be used
in place of the 1/4"-100 adjustment screws
in our KS1TV Mirror Mount.
PIAK10VF
10 mm Travel Range,
1/4"-100 Thread and Ø3/8" Barrel








Please Wait
| Key Specificationsa | ||
|---|---|---|
| Item # | PIAK10VF | PIA13VF |
| Travel | 10 mm (0.39") | 13 mm (0.51") |
| Typical Step Sizeb,c | 20 nm | |
| Maximum Step Size | 30 nm | |
| Step Size Adjustabilityc | ≤30% | |
| Maximum Step Frequency | 2000 Hz | |
| Maximum Active Preloadd | 30 N | 25 N |
| Recommended Maximum Axial Load Capacitye |
2.5 kg (5.51 lbs) | |
| Speed (Continuous Stepping) | 2 mm/minute (Typical) <3.5 mm/minute (Maximum) |
|
| Drive Screw | 1/4"-80 Thread, Hard PVD Coated | |
| Motor Type | Piezoelectric Inertia | |
| Primary Mounting Feature | 1/4"-100 Threadf |
Ø3/8" (Ø9.525 mm) Barrel |
| Vacuum Rating | 10-6 Torr | |
| Required Controllerg | KIM001 or KIM101 | |
Click for Details
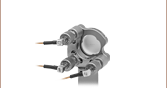
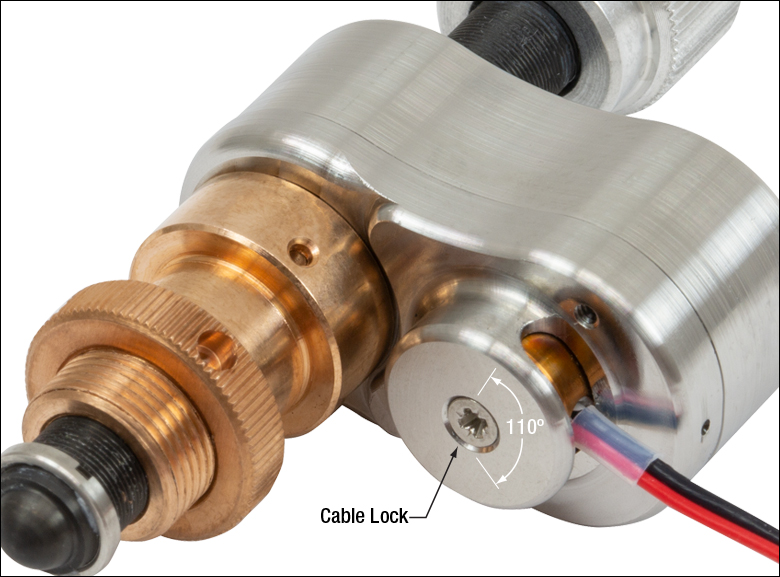
The flying lead can be adjusted up to 110° for space-constrained applications.
Features
- Compact Design: 31.5 mm x 17.0 mm (W x H)
- 20 nm Typical Step Size
- Manual Adjustment via Knob on Adjuster Screw
- Rated Down to 10-6 Torr
- 125 V Maximum Operating Voltage
- PIAK10VF: 1/4"-100 Mounting Thread for Compatibility with KS1TV Mirror Mount
- PIA13VF: Ø3/8" Mounting Barrel for Compatibility with Translation Stages
- Ideal for Set-and-Hold Applications that Require High-Resolution Relative Positioning
- Control Cable can be Adjusted up to 110° for Space-Constrained Applications
Thorlabs' Vacuum-Compatible Piezoelectric Inertia Actuators provide high-resolution linear motion control with long piezo translation ranges in compact, vacuum-compatible packages. Each actuator can support loads up to 2.5 kg with typical movements of 20 nm and no backlash. The step size can be adjusted up to 30% to a maximum of 30 nm using the KIM001 or KIM101 Controllers (sold separately below). Due to the open-loop design, hysteresis, and application conditions, the achieved step size of the system can vary by up to 20% and is not normally repeatable. An external feedback system will need to be used to overcome this variance. We also offer standard piezo inertia actuators for non-vacuum applications.
These actuators are self-locking when at rest and when there is no power supplied to the piezo, making them ideal for set-and-hold applications that require nanometer resolution and long-term alignment stability. Manual adjustments can be made using the knob on the adjuster screw, as long as the piezo is not actively translating the screw; the knob is also compatible with 5/64" (2.0 mm) hex keys.
Powered by 10 mm long discrete piezo stacks, these actuators operate at speeds of up to 3.5 mm/minute. The design of the piezo motor, detailed below, will rotate the tip of the lead screw during translation.
Mounting Options
The PIAK10VF actuator features a 1/4"-100 threaded barrel for compatibility with the KS1TV mirror mount or other mounts with non-matched 1/4"-100 actuators. Note that this actuator is not compatible with our Polaris® mirror mounts; see below for details.
The PIA13VF actuator has a Ø3/8" (Ø9.525 mm) barrel that can be mounted in a manual stage that has a Ø3/8" mounting clamp.
Each actuator has an integrated 0.75 m flying lead, plus 1.0 m of cored cable for wiring outside the vacuum chamber. The flying leads and cored cable lengths can be cut down as needed, but the total length (inside and outside) should not exceed 2.0 m. As shown in the image above, the flying lead for each actuator can be rotated up to 110° for space-constrained applications.
Required Controller
A KIM001 or KIM101 Controller, available below, is required to operate this actuator; it cannot be driven using a standard piezo controller. These drivers have an internal sawtooth voltage signal generator capable of sending sub-millisecond pulses (steps) with controllable amplitudes from 85 V to 125 V.
Click to Enlarge
Simplified Illustration Showing the Operation of an Inertia Piezo Actuator
Piezoelectric Inertia "Slip-Stick" Motor
A piezo stack mounted perpendicular to the lead screw axis actuates the screw via a design based on the system's inertia and coefficients of friction. Two decoupled arms, or jaws, are located on either side of the piezo. These arms extend across the top and bottom of the main lead screw, as illustrated in the diagram to the left.
The piezo reacts to a custom sawtooth voltage waveform, causing it to expand or contract. The waveform is asymmetric, slowly ramping up to the specified voltage and then quickly dropping the voltage to zero on a nanosecond timescale. As shown in the bottom illustration to the left, the jaws will "stick" to the lead screw during the slow voltage ramp due to static friction, turning the screw similar to a person using their thumb and forefinger. The nanosecond voltage drop will cause the arms to "slip" due to the screws' inertia and the lower coefficient of dynamic friction, allowing the arms to return to their original position without undoing the rotation of the screw. This mechanism allows a single piezo element to translate a lead screw along its entire length.
Due to a number of factors that include the application conditions, piezo hysteresis, component variance, and the axial load, the achieved step size will vary and is not repeatable. To help overcome this variance, an external feedback system will need to be used. Alternatively, a stepper motor actuator can also be substituted depending on the application.
| Item #a | PIAK10VF | PIA13VF |
|---|---|---|
| Travel | 10 mm (0.39") | 13 mm (0.51") |
| Typical Step Sizeb,c | 20 nm | |
| Maximum Step Size | 30 nm | |
| Step Size Adjustabilityc | ≤30% | |
| Maximum Step Frequency | 2000 Hz | |
| Backlash | None | |
| Maximum Active Preloadd | 30 N | 25 N |
| Typical Angular Resolutione | KS1TV Ø1" Mirror Mount: 0.5 µrad | N/A |
| Recommended Maximum Active Axial Load Capacityf |
2.5 kg (5.51 lbs) | |
| Speed (Continuous Stepping) | 2 mm/minute (Typical) <3.5 mm/minute (Maximum) |
|
| Drive Screw | 1/4"-80 Thread, Hard PVD Coated | |
| Actuator Tip | Tungsten-Carbide-Coated Ball | |
| Lifetime | >1,000,000,000 Steps | |
| Motor Type | Piezoelectric Inertia | |
| Piezo Specifications | ||
| Max Operating Voltage | 125 V | |
| Capacitance | 175 nF | |
| Resonant Frequency | 125 kHz (No Load) | |
| Physical Specifications | ||
| Dimensionsg (L x W x H) | 77.7 mm x 31.5 mm x 17.0 mm (3.06" x 1.24" x 0.67") |
59.4 mm x 31.5 mm x 17.0 mm (2.34" x 1.24" x 0.67") |
| Mounting Feature (Auxiliary) |
1/4"-100 Thread with Lock Nuth (Ø3/8" [Ø9.525 mm] Barrel) |
Ø3/8" (Ø9.525 mm) Barrel (3/8"-40 Thread with Lock Nut) |
| Vacuum Rating | 10-6 Torr | |
| Operating Temperature | 5 to 130 °C (41 to 266 °F) | |
| Cable Length | 0.75 m (2.48 ft) Flying Lead for Vacuum, 1.0 m (3.3 ft) of Cored Cable for Wiring Outside Chamber |
|
| Connector Type | SMC Female | |
| Cable Exit Adjustability | ±55° for Left- or Right-Hand Exit | |
| Compatible Controlleri | KIM001 or KIM101 | |
Thorlabs offers two platforms to drive our wide range of motion controllers: our Kinesis® software package or the legacy APT™ (Advanced Positioning Technology) software package. Either package can be used to control devices in the Kinesis family, which covers a wide range of motion controllers ranging from small, low-powered, single-channel drivers (such as the K-Cubes™ and T-Cubes™) to high-power, multi-channel, modular 19" rack nanopositioning systems (the APT Rack System).
The Kinesis Software features .NET controls which can be used by 3rd party developers working in the latest C#, Visual Basic, LabVIEW™, or any .NET compatible languages to create custom applications. Low-level DLL libraries are included for applications not expected to use the .NET framework. A Central Sequence Manager supports integration and synchronization of all Thorlabs motion control hardware.
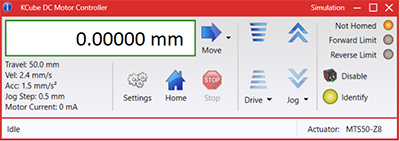
Kinesis GUI Screen
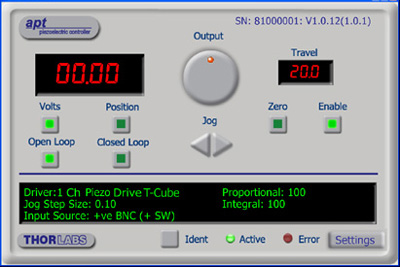
APT GUI Screen
Our legacy APT System Software platform offers ActiveX-based controls which can be used by 3rd party developers working on C#, Visual Basic, LabVIEW™, or any Active-X compatible languages to create custom applications and includes a simulator mode to assist in developing custom applications without requiring hardware.
By providing these common software platforms, Thorlabs has ensured that users can easily mix and match any of the Kinesis and APT controllers in a single application, while only having to learn a single set of software tools. In this way, it is perfectly feasible to combine any of the controllers from single-axis to multi-axis systems and control all from a single, PC-based unified software interface.
The software packages allow two methods of usage: graphical user interface (GUI) utilities for direct interaction with and control of the controllers 'out of the box', and a set of programming interfaces that allow custom-integrated positioning and alignment solutions to be easily programmed in the development language of choice.
A range of video tutorials is available to help explain our APT system software. These tutorials provide an overview of the software and the APT Config utility. Additionally, a tutorial video is available to explain how to select simulator mode within the software, which allows the user to experiment with the software without a controller connected. Please select the APT Tutorials tab above to view these videos.
Software
Kinesis Version 1.14.47
The Kinesis Software Package, which includes a GUI for control of Thorlabs' Kinesis and APT™ system controllers.
Also Available:
- Communications Protocol
Software
APT Version 3.21.6
The APT Software Package, which includes a GUI for control of Thorlabs' APT™ and Kinesis system controllers.
Also Available:
- Communications Protocol
Thorlabs' Kinesis® software features new .NET controls which can be used by third-party developers working in the latest C#, Visual Basic, LabVIEW™, or any .NET compatible languages to create custom applications.
C#
This programming language is designed to allow multiple programming paradigms, or languages, to be used, thus allowing for complex problems to be solved in an easy or efficient manner. It encompasses typing, imperative, declarative, functional, generic, object-oriented, and component-oriented programming. By providing functionality with this common software platform, Thorlabs has ensured that users can easily mix and match any of the Kinesis controllers in a single application, while only having to learn a single set of software tools. In this way, it is perfectly feasible to combine any of the controllers from the low-powered, single-axis to the high-powered, multi-axis systems and control all from a single, PC-based unified software interface.
The Kinesis System Software allows two methods of usage: graphical user interface (GUI) utilities for direct interaction and control of the controllers 'out of the box', and a set of programming interfaces that allow custom-integrated positioning and alignment solutions to be easily programmed in the development language of choice.
For a collection of example projects that can be compiled and run to demonstrate the different ways in which developers can build on the Kinesis motion control libraries, click on the links below. Please note that a separate integrated development environment (IDE) (e.g., Microsoft Visual Studio) will be required to execute the Quick Start examples. The C# example projects can be executed using the included .NET controls in the Kinesis software package (see the Kinesis Software tab for details).
 |
Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples |
|
LabVIEW
LabVIEW can be used to communicate with any Kinesis- or APT-based controller via .NET controls. In LabVIEW, you build a user interface, known as a front panel, with a set of tools and objects and then add code using graphical representations of functions to control the front panel objects. The LabVIEW tutorial, provided below, provides some information on using the .NET controls to create control GUIs for Kinesis- and APT-driven devices within LabVIEW. It includes an overview with basic information about using controllers in LabVIEW and explains the setup procedure that needs to be completed before using a LabVIEW GUI to operate a device.
 |
Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page |
|
The APT video tutorials available here fall into two main groups - one group covers using the supplied APT utilities and the second group covers programming the APT System using a selection of different programming environments.
Disclaimer: The videos below were originally produced in Adobe Flash. Following the discontinuation of Flash after 2020, these tutorials were re-recorded for future use. The Flash Player controls still appear in the bottom of each video, but they are not functional.
Every APT controller is supplied with the utilities APTUser and APTConfig. APTUser provides a quick and easy way of interacting with the APT control hardware using intuitive graphical control panels. APTConfig is an 'off-line' utility that allows various system wide settings to be made such as pre-selecting mechanical stage types and associating them with specific motion controllers.
APT User Utility
The first video below gives an overview of using the APTUser Utility. The OptoDriver single channel controller products can be operated via their front panel controls in the absence of a control PC. The stored settings relating to the operation of these front panel controls can be changed using the APTUser utility. The second video illustrates this process.
APT Config Utility
There are various APT system-wide settings that can be made using the APT Config utility, including setting up a simulated hardware configuration and associating mechanical stages with specific motor drive channels. The first video presents a brief overview of the APT Config application. More details on creating a simulated hardware configuration and making stage associations are present in the next two videos.
APT Programming
The APT Software System is implemented as a collection of ActiveX Controls. ActiveX Controls are language-independant software modules that provide both a graphical user interface and a programming interface. There is an ActiveX Control type for each type of hardware unit, e.g. a Motor ActiveX Control covers operation with any type of APT motor controller (DC or stepper). Many Windows software development environments and languages directly support ActiveX Controls, and, once such a Control is embedded into a custom application, all of the functionality it contains is immediately available to the application for automated operation. The videos below illustrate the basics of using the APT ActiveX Controls with LabVIEW, Visual Basic, and Visual C++. Note that many other languages support ActiveX including LabWindows CVI, C++ Builder, VB.NET, C#.NET, Office VBA, Matlab, HPVEE etc. Although these environments are not covered specifically by the tutorial videos, many of the ideas shown will still be relevant to using these other languages.
Visual Basic
Part 1 illustrates how to get an APT ActiveX Control running within Visual Basic, and Part 2 goes on to show how to program a custom positioning sequence.
LabVIEW
Full Active support is provided by LabVIEW and the series of tutorial videos below illustrate the basic building blocks in creating a custom APT motion control sequence. We start by showing how to call up the Thorlabs-supplied online help during software development. Part 2 illustrates how to create an APT ActiveX Control. ActiveX Controls provide both Methods (i.e. Functions) and Properties (i.e. Value Settings). Parts 3 and 4 show how to create and wire up both the methods and properties exposed by an ActiveX Control. Finally, in Part 5, we pull everything together and show a completed LabVIEW example program that demonstrates a custom move sequence.
Part 1: Accessing Online Help
Part 2: Creating an ActiveX Control
Part 3: Create an ActiveX Method
Part 4: Create an ActiveX Property
Part 5: How to Start an ActiveX Control
The following tutorial videos illustrate alternative ways of creating Method and Property nodes:
Create an ActiveX Method (Alternative)
Create an ActiveX Property (Alternative)
Visual C++
Part 1 illustrates how to get an APT ActiveX Control running within Visual C++, and Part 2 goes on to show how to program a custom positioning sequence.
MATLAB
For assistance when using MATLAB and ActiveX controls with the Thorlabs APT positioners, click here.
To further assist programmers, a guide to programming the APT software in LabVIEW is also available here.
| Posted Comments: | |
| No Comments Posted |

 Zoom
Zoom- Actuators Provide High-Resolution Linear Motion in a Compact Package
- PIAK10VF: 1/4"-100 Mounting Thread for Compatibility with KS1TV Mirror Mount
- PIA13VF: Ø3/8" (Ø9.525 mm) Barrel for Mounting to Manual Stages with Ø3/8" (Ø9.525 mm) Mounting Clamps
- KIM001 or KIM101 Controller Required for Operation (Sold Separately Below)
These Vacuum-Compatible Piezoelectric Inertia Actuators are ideal for set-and-forget vacuum applications, particularly where space is limited. Their primary function is to set a relative position and hold; switching off power to the actuator will result in the same drift as a 1/4"-80 drive screw. The PIAK10VF actuator is designed for use with the KS1TV mirror mount and the PIA13VF actuator is designed for use with our range of small positioning stages, and each actuator provides nanometer resolution with long-term alignment stability. Manual adjustments can be made using the knob on the adjuster screw, as long as the piezo is not actively translating the screw; the knob is also compatible with 5/64" (2.0 mm) hex keys. To order vacuum-compatible versions of our stages and mirror mounts, please contact Technical Support.
The "slip-stick" nature of this device uses very short pulse widths and continuous stepping of the actuator will result in an audible noise at a typical level of 60 to 70 dB.
Note: The PIAK10VF actuator is not compatible with Polaris® mounts that use 1/4"-100 adjusters. These mounts require a specific actuator ball size and tip design to ensure that the ball contact is centered on the sapphire end stone and that there is proper screw clearance during full translation. In the case of the PIAK10VF actuator, the side of the screw, rather than the ball tip, will contact the sapphire end stone and, as a result, the actuator should not be used with Polaris mounts.

 Zoom
Zoom| Key Specificationsa | ||
|---|---|---|
| Item # | KIM001 | KIM101 |
| Piezoelectric Outputs (SMC Male) | One | Four |
| Piezo Output Voltage | 85 to 125 VDC | 85 to 125 VDC per Channel |
| Top Panel Controls | Scroll Wheel | Dual-Axis Joystick |
| External Input (SMA Female) |
±10 V ± 2% | |
| Input Power | +15 VDC @ 2 A | |
| Housing Dimensionsb |
60.0 mm x 60.0 mm x 47.0 mm (2.36" x 2.36" x 1.85") |
121.0 mm x 60.0 mm x 47.0 mm (4.76" x 2.36" x 1.85") |
| Compatible Software | Kinesis | Kinesis & Legacy APT |
- For complete specifications, please see the manuals by clicking the red Docs icons (
 ) below.
) below. - Not Including Mounting Plate
- Compact Footprints
- Adjustable Voltage Output from 85 V to 125 V
- Single-Channel and Four-Channel Versions Available
- Standalone Operation via Top Panel Controls and Display or PC Control via USB Plug and Play
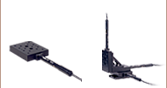
These compact K-Cube Controllers provide easy manual and PC control of our piezo inertia stages, actuators, and optic mounts. They feature adjustable voltage output from 85 V to 125 V. The top panel display screen enables operation as soon as the unit is turned on, without the need for connection to a PC. Alternatively, both controllers have USB connectivity that provides 'Plug-and-Play' PC-controlled operation with our Kinesis® software package (included). These controllers can also be operated with our legacy APT™ (Advanced Positioning Technology) software package.
These units have small footprints and may be mounted directly to the optical table using the 1/4" (M6) counterbored slots in the base plate. Their compact size allows these controllers to be positioned close to the motorized system for added convenience when manually adjusting motor positions using the top panel controls. Tabletop operation also allows minimal drive cable lengths for easier cable management.
Please note that these controllers do not ship with a power supply. The compatible KPS201 power supply is sold below.
KIM001 Single-Channel Controller
This single-channel piezo inertia controller provides a voltage output for a single piezo inertia stage or actuator. The top panel features a spring-loaded scroll wheel for driving the stage or actuator as well as selecting menu options.
KIM101 Four-Channel Controller
This four-channel controller features four SMC outputs to drive piezo inertia devices. The channels can be controlled independently or simultaneously in pairs using the dual-axis joystick on the controller's top panel. The controller can be configured to operate up to four PD series piezo inertia stages, up to four PIA series piezo inertia actuators, or up to two PIM series piezo inertia optic mounts; one KIM101 can only concurrently drive devices that use the same "Select Stage" configuration in the controller's menu options (see the manuals for more details).
For more information, please see the full web presentation.
Power Supply Options
The KIM001 and KIM101 Motor Controllers do not ship with a power supply. A compatible power supply is our KPS201, sold below.
Note: Due to the nature of its design, and its non-linear high frequency switching, the KIM001 and KIM001 units are not compatible with the KCH301 and KCH601 hubs. Only use the KPS201 power supply unit.

 Zoom
Zoom- Power Supply Compatible with KIM001 and KIM101 Motor Controllers
- Universal Input: 100 - 240 VAC
- Region-Specific Adapter Plug Shipped with Power Supply
The KPS201 power supply outputs +15 VDC at up to 2.66 A and can power a single K-Cube or T-Cube with a 3.5 mm jack. It plugs into a standard wall outlet. One region-specific plug adapter, selectable at checkout, is included with each power supply.